1、 Core Value: From End effectors to Intelligent Interactive Interfaces
As a key component of humanoid robots, the technical importance of dexterous hands has far exceeded that of traditional end effectors. According to a technical report by the International Federation of Robotics (IFR), modern dexterous hands are evolving from simple grasping tools to intelligent interactive interfaces with multimodal perception capabilities. This evolution is not only reflected in the complexity of the mechanical structure, but also in its deep integration with the overall intelligent system of robots. In the design of the latest generation of humanoid robots, the dexterous hand has become a core component for achieving environmental interaction, object recognition, and fine manipulation. Its performance directly determines whether the robot can effectively perform tasks in unstructured environments.
From the perspective of technological evolution, the development of dexterous hands has gone through three important stages: from the initial two finger gripper, to the multi finger hand with basic adaptive capabilities, and then to the current intelligent dexterous hand that integrates driving, sensing, and control. This evolution process reflects the inevitable trend of robot technology expanding from industrial automation to service-oriented and collaborative applications. According to research data from MIT Robotics Lab, the design degrees of freedom for modern dexterous hands typically range from 15-30, enabling over 90% of basic human hand functions, which is a milestone in the history of robotics technology development.

2、 Technical Architecture: Biomimetic Design and System Integration
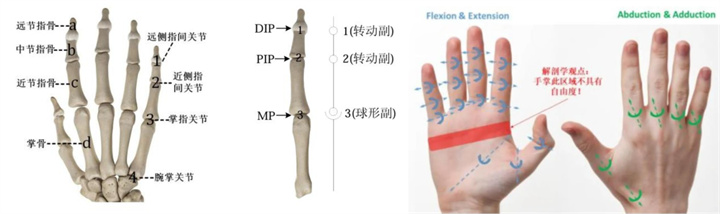
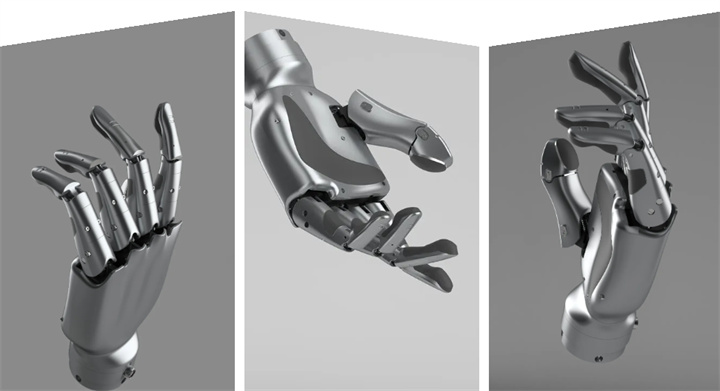
At the technical implementation level, modern dexterous hands adopt a highly biomimetic system architecture. From the perspective of mechanical structure, its design fully draws on the anatomical features of the human hand, including metacarpal structure, finger joint distribution, and joint kinematic characteristics. According to the technical white paper released by Shadow Robot Company, its new generation Dexterous Hand adopts a 24 degree of freedom design, with each finger achieving independent motion control while maintaining dynamic characteristics similar to human hands.
The design of the driving system is one of the core challenges of dexterous hand technology. The current mainstream solutions include two technical routes: distributed motor drive and centralized tendon rope drive. Research by the German DLR Institute shows that although tendon rope transmission systems increase control complexity, they have significant advantages in weight distribution, motion flexibility, and impact tolerance. The latest developed HIT Hand II adopts a super elastic alloy tendon rope and a variable stiffness mechanism, achieving motion accuracy and force control capability close to that of the human hand. In terms of sensing systems, modern dexterous hands typically integrate multimodal sensor arrays, including joint position sensors, six axis force and torque sensors, distributed tactile sensors, etc., forming a complete perception feedback loop.
3、 Perception System: Multimodal Sensing and Information Fusion
The perception system of the dexterous hand forms the foundation of its intelligence. According to the latest research from IEEE Transactions on Robotics, the sensing system of modern dexterous hands is developing towards high-density and multimodal directions. Tactile sensing technology is particularly critical, and currently mainly adopts sensing solutions based on optics, capacitance, and piezoresistive. The GelSight 3D tactile sensor from MIT in the United States can achieve sub millimeter level texture recognition accuracy, providing unprecedented tactile perception capabilities for dexterous hands.
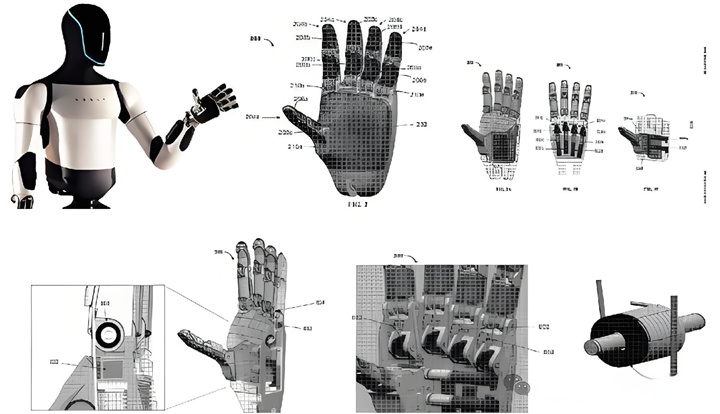
At the level of information processing, multi-sensor data fusion technology plays an important role. A dexterous hand constructs a complete cognitive model of the operating object by integrating joint position information, contact force data, and visual information. The Bionic Soft Hand 2.0 developed by ETH Zurich in Switzerland adopts a distributed fiber optic sensing network, which can achieve continuous pressure distribution detection on the entire hand surface, and combines deep learning algorithms to achieve object material recognition and slip prediction. This advanced perceptual ability enables dexterous hands to perform fine operational tasks such as egg grasping and paper flipping.
4、 Control Strategy: From Traditional Control to Intelligent Algorithms
The control strategy of dexterous hands has undergone a significant transformation from traditional control methods to modern intelligent algorithms. At the traditional control level, model-based control methods still play an important role. This type of method achieves precise control of hand movements by establishing an accurate robot dynamics model. The ASIMO robotic hand developed by Honda in Japan adopts a hierarchical control architecture, effectively separating high-level task planning from low-level joint level control.
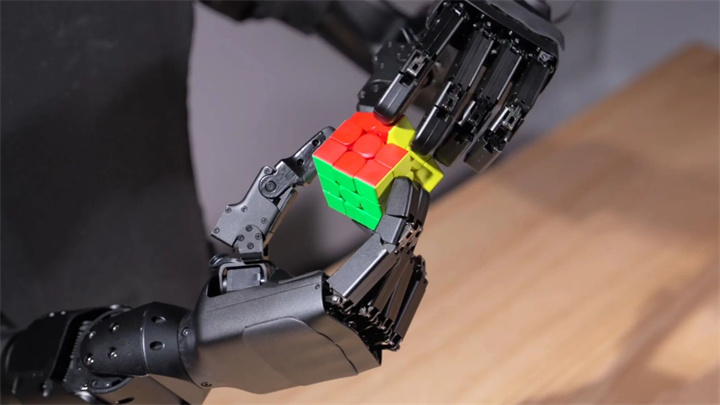
However, as task complexity increases, learning based control methods demonstrate significant advantages. Deep reinforcement learning has made breakthrough progress in dexterous hand control. The research team of Google DeepMind has implemented various complex operational skill learning on Shadow Dexterous Hand using sim to real transfer learning methods. The latest research results show that well-trained dexterous hands can autonomously master highly coordinated operational tasks such as turning pens and solving Rubik's cubes. In addition, imitation learning also provides new ideas for dexterous hand control, greatly improving the efficiency of skill learning by demonstrating data to learn human operational skills.
5、 Frontier research: interdisciplinary integration and new breakthroughs
The current technological breakthroughs in the field of dexterous hands are deeply dependent on interdisciplinary integration and innovation. Our core member of the expert database, Guo Xiaokang, a Ph.D. in computational chemistry from New York University, leads a research team that innovatively applies cutting-edge theories and core technologies in computational chemistry to the development and practice of dexterous hands. The team has made breakthrough progress in key areas such as material selection optimization, precise design of mechanical structures, and improvement of dynamic response performance in dexterous hands through interdisciplinary technology integration, providing a new solution for the technological upgrade of dexterous hands in precision operation, complex environment adaptation, and other scenarios.
In terms of system integration, researchers from Carnegie Mellon University in the United States have developed a lightweight dexterous hand design based on origami structures. This innovative design not only significantly reduces the weight of the system, but also achieves precise adjustment of gripping force through a variable stiffness mechanism. At the same time, with the development of flexible electronic technology, significant progress has been made in the integration of stretchable sensors and dexterous hands, laying the technical foundation for achieving a truly "electronic skin".
6、 Industrial Ecology: Technological Evolution and Market Prospects
The industrial ecosystem of dexterous hands is rapidly forming and improving. From a global perspective, European and American companies dominate the high-end dexterous hand market, with products from Shadow Robot Company in the UK and SCHUNK in Germany widely used in scientific research. According to market research firm ABI Research's forecast, by 2028, the global market size for dexterous hands will reach $4.7 billion, with a compound annual growth rate of over 35%.
In the Chinese market, the dexterous hand industry chain is accelerating its formation. Domestic enterprises have achieved technological breakthroughs in core components such as drivers and sensors, and have demonstrated strong competitiveness in system integration. The agile hand products launched by innovative enterprises such as Azure Technology and Yushu Technology have approached the international advanced level in terms of performance indicators. Meanwhile, with the rapid development of the humanoid robot industry, the technological maturity and cost control capability of the dexterous hand as a key component will become an important factor affecting the overall development speed of the industry.
7、 Challenge and Prospect: The Technological Path to Universalization
Despite significant progress in dexterous hand technology, it still faces many challenges. At the technical level, reliability, durability, and cost control are the main bottlenecks restricting its commercial application. According to the technical report from the IEEE Robotics and Automation Association, the average time between failures for the most advanced dexterous hands is still less than 1000 hours, which is still far from the requirements of industrial applications. In addition, real-time perception and decision-making in complex environments, as well as autonomous learning of multi finger coordinated operations, are also technical difficulties that urgently need to be overcome.
Looking ahead to the future, dexterous hand technology will continue to evolve along three main directions: intelligence, lightweight, and low cost. With the continuous emergence of new materials and processes, as well as the deep application of artificial intelligence technology, the performance of dexterous hands will be further improved, and the application scenarios will gradually expand from specialized scientific research and industrial fields to broader fields such as medical services and home elderly assistance. The maturity of dexterous hand technology will lay a solid foundation for the true universality of humanoid robots and promote the development of robotics technology into a new stage.