In the spring of 2025, "embodied intelligence" and "humanoid robots" will be included in the government work report for the first time, marking the official entry of these cutting-edge technologies into the national strategic vision. At this critical turning point of intelligent technology moving from virtual to physical, understanding the connotations and correlations of these concepts is not only related to technological cognition, but also affects our imagination of the future era of human-machine symbiosis.
From 'detachment' to 'embodiment': the paradigm revolution of intelligence
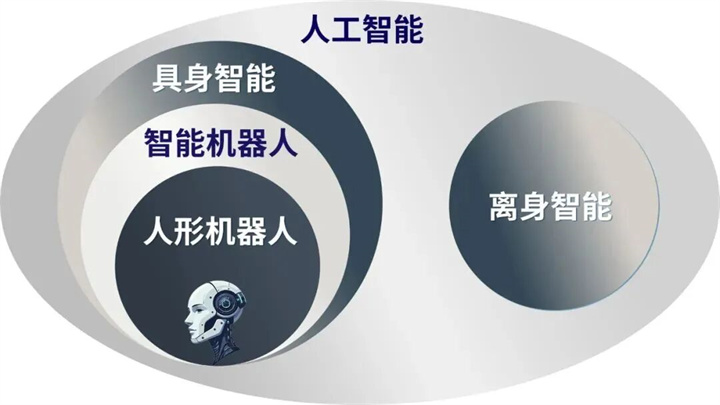
As ChatGPT demonstrates astonishing capabilities in the digital world, another branch of artificial intelligence - embodied intelligence - is breaking the boundaries between virtual and real. Xiong Youjun, Deputy Secretary General of the Chinese Humanoid Robot Hundred People's Association, has a clever metaphor for this: "Off body intelligence is just 'talking', while embodied intelligence needs to 'work' in the physical world and be a 'doer'

The essence of embodied intelligence is to enable intelligence to interact with the environment through physical entities, achieving a unified cycle of perception, cognition, decision-making, and action. According to the definition of the Chinese Computer Society, this is an intelligent system that perceives and acts based on physical bodies, and its core lies in the continuous interaction between the intelligent agent and the environment. This kind of interaction is not simply about "executing instructions", but through repeated trial and error, continuous learning, and the accumulation of a profound understanding of physical laws in the real world.
Professor Chen Jianyu from Tsinghua University explained from an architectural perspective that "embodied intelligence can be divided into two parts: general ontology and general intelligence." This perspective reveals the modular trend of future intelligent development - the same intelligent system can adapt to various physical forms from robotic arms to intelligent vehicles, achieving intelligent "plug and play".

Intelligent Robots: Physical Exploration of Embodied Intelligence
Under the theoretical framework of embodied intelligence, intelligent robots have become an important carrier for the realization of this concept. The essential difference between intelligent robots and traditional automation equipment lies in their ability to interact with the environment. Xiong Youjun emphasized that intelligent robots must meet two basic conditions: having a physical body and the ability to perceive, think, interact, and act with the physical world.

This distinction has important practical significance. In industrial sites, traditional robotic arms may only repeat preset actions, while truly intelligent robots can perceive small changes in the position of workpieces and autonomously adjust grasping force and trajectory. Just as babies learn about the world through touch, grasping, and falling, intelligent robots also need to develop a "common sense understanding" of physical laws through the interaction between their bodies and the environment.
Professor Wang Tianmiao from Beihang University proposed a more macroscopic perspective: "Embodied intelligence is a mechanical carrier that can be humanoid, robotic arm, wheeled, or unmanned aerial vehicle or vehicle." This viewpoint breaks the cognitive limitation of embodied intelligence to a specific form and demonstrates the rich diversity of technological paths.
Humanoid robots: the necessary path to universal intelligence
Among various forms, humanoid robots occupy a special position. Xu Bin, General Manager of the National and Local Collaborative Innovation Center for Humanoid Robots, clearly pointed out that "humanoid robots are the highest form of intelligent robots." This positioning is not only due to technological complexity, but also because of the natural adaptability of humanoid design in the human environment - the world we live in is designed for the human body.
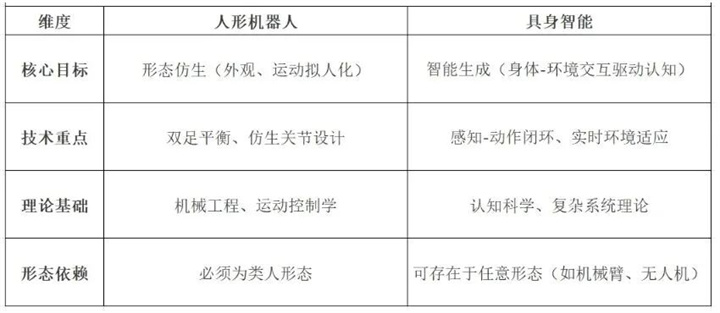
Humanoid robots and embodied intelligence are essentially concepts from different dimensions. The former focuses on the biomimicry of physical forms, while the latter emphasizes the interactivity of intelligent generation. The two have formed an interesting symbiotic relationship in the development of modern technology: humanoid robots have become an ideal experimental platform for embodied intelligence, and embodied intelligence provides a theoretical basis for humanoid robots to transcend their "machine" identity.
Professor Wang Tianmiao predicts that in the next decade, the proportion of humanoid robots in the entire field of intelligent robots will be about 10%, and may reach 20% in certain special fields. This data reminds us that while focusing on humanoid robots, we should not overlook the development potential of other forms of intelligent robots. After all, the value of technology lies in solving practical problems, rather than pursuing perfection in form.
Crossing the Gap between Theory and Reality
Despite the promising prospects, the path from concept to industry remains challenging. Zhang Yaqin, academician of the CAE Member, pointed out that it may take 5 to 10 years for the humanoid robot to reach a mature stage. This time span reflects the complexity of technology integration.
Academician Yu Haibin's analysis is more detailed: "In the next decade, embodied intelligent algorithms and training platforms will develop rapidly, while hardware is limited by materials and processes, and the progress rate is relatively slow." This judgment provides important insights for enterprise development: at the current stage, prioritizing the deployment of software ecosystems and algorithm platforms may have more strategic value than blindly investing in hardware research and development.
The current technological breakthroughs mainly focus on improving multimodal perception and decision-making capabilities. By introducing new large-scale models such as visual language action models, combined with advanced control methods such as reinforcement learning and imitation learning, researchers are committed to improving the adaptability of robots in unknown and complex environments. This is like equipping robots with a 'digital cerebellum', allowing them to better coordinate their thinking and actions.
Important considerations for industrialization
Moving from the laboratory to industrialization requires crossing three key thresholds: efficiency, safety, and cost. Professor Wang Tianmiao emphasized that these three elements are the core criteria for measuring whether any new technology can enter industrial applications. Especially in the field of humanoid robots, due to the extremely high complexity of the system, ensuring operational safety and reliability has become the top priority.
The expansion of application scenarios follows a path from specific domains to general domains. Experts generally believe that humanoid robots will first find a foothold in industrial manufacturing, special operations, hazardous environment handling, and other scenarios. Completing screw tightening in automobile factories, conducting equipment inspections in chemical plants, and performing search and rescue missions at disaster sites - these seemingly simple tasks are important steps towards the maturity of robotics technology.

The investment community maintains a cautious and optimistic attitude towards this track. The partner of an early science and technology investment institution in East China pointed out that "the industry is going through a foam period with a relatively high valuation, but in the long run, robots are a very long race track." This understanding helps the market to form rational expectations and avoid damaging long-term development due to short-term speculation.
Towards the future of human-machine symbiosis
The development of embodied intelligence is not only a technological revolution, but also a deep exploration of the essence of human intelligence. When we endow intelligent agents with physical bodies, we are also rethinking the relationship between intelligence, body, and environment. This kind of thinking will profoundly influence the way and ethical framework of future human-computer interaction.
From intelligent robotic arms in the kitchen to humanoid robots in factories, from mobile chassis in logistics warehouses to drones for outdoor inspections, embodied intelligence is integrating into our production and life in various forms. This process requires the joint promotion of technological breakthroughs, industrial synergy, and social acceptance.
As expected by experts, the next decade will be a critical period for the development of embodied intelligence and related technologies. In this process, maintaining diversity in technological exploration, respecting the objective laws of industrial development, and establishing reasonable social expectations will help us more smoothly embrace the new era of coexistence between intelligent agents and humans.